“Consciousness is a state that defies definition, but which may involve thoughts, sensations, perceptions, moods, emotions, dreams, and an awareness of self, although not necessarily all of these. Consciousness is a point of view, an I, or what Thomas Nagel called the existence of “something that it is like” to be something.” – Wikipedia
Have you ever tried to grasp the notion of consciousness? Not so easy, huh? Especially with descriptions like the one above. You can tell that there is a problem when an apparently scientific term “defies definition”. How could scientists communicate if they don’t know the meaning of words they are using? Well, they cannot. Perhaps that is why the word “consciousness” is mostly used by practioners of, so called, human sciences.
Here I will argue that consciousness can be defined in plain terms using analogy to a machine, a robot.
The robots have one goal: To keep their environment, or part of it, in a desired state. Our model of robot is the following: It is a box with some inputs (sensors) and outputs (effectors). The robot receives signals from its environment through its sensors and affects the environment with the effectors. See Fig.1.
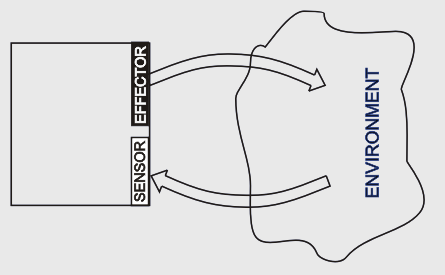
Fig. 1. Robot and environment.
The box is there just to connect sensors with effectors. If this connection is advanced enough the robot will be “conscious”. But first, lets see how our robot works.
Its sensors sense the state of the environment. For some states the robot takes an action i.e. it changes the state of surroundings with effectors. So, there is a need for the robot to store a list of states that require a particular action. To accommodate this input-output list the box should be equipped with a memory. See Fig.2.
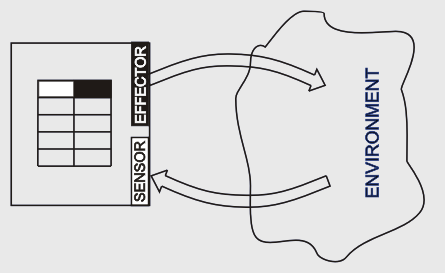
Fig. 2.Robot equipped with memory.
Such a robot has no consciousness whatsoever. The major shortcoming of such a machine is that it often fails in maintaining the state of the environment.
For example, it can fall into destructive cycles, where the effectors stimulate sensors, through the environment, to drive them ever harder.
Or a change in the properties of the environment could render the input-output list inadequate.
To avoid those problems one has to make the robot “aware” of its actions. It should be able to predict, beforehand, what effect given action will have on the environment and on its sensors, in consequence. In other words, the robot should run an internal simulation of its action on the environment to find the one that leads to a desired state. For that the box should have the model of the environment and the robot itself. Only then the simulation of interaction robot-environment will be possible. See Fig.3.
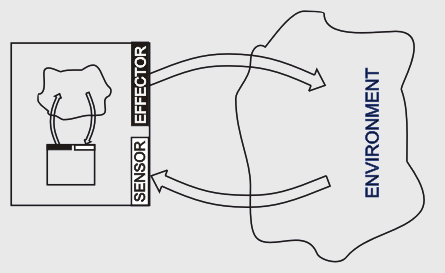
Fig. 3. Conscious robot.
And here comes the consciousness:
Consciousness is an internal model of the self embedded in the environment.
The consciousness is there to provide the ability of predicting ones own actions.
Zbigniew Karkuszewski, May 21-st 2008